
Avvio dell'analisi pushover
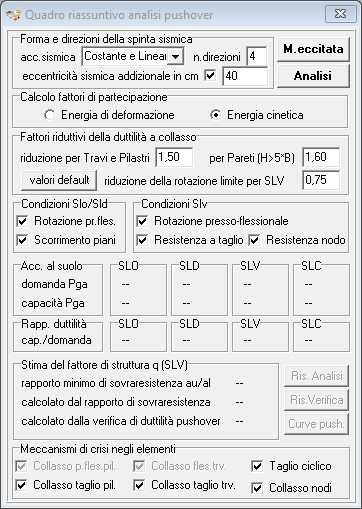
Scegliendo “Analisi statica nonlineare” dal menù Analisi compare la seguente finestra.
Nei due riquadri superiori è possibile impostare alcuni parametri specifici per l’analisi pushover ed avviare l’analisi dal pulsante omonimo.
Ad analisi conclusa, nei riquadri sottostanti verranno riportati i risultati principali ottenuti.
Il significato delle quantità è di seguito descritto.
Forme di distribuzione dell’accelerazione sismica
Aprendo la tendina si ha la possibilità di scegliere fra le seguenti opzioni:
- Costante sull’altezza
- Lineare sull’altezza
- Costante e lineare sull’altezza
Nei primi due casi l’analisi nonlineare per una data direzione sismica è eseguita solo per la distribuzione selezionata, nel terzo l’analisi è eseguita due volte, applicando prima la distribuzione costante e poi quella lineare.
Numero di direzioni angolari per l’azione sismica
Il parametro fissa il numero di direzioni angolari su cui far variare l’azione sismica nell’analisi nonlineare. Se ad esempio si fissano 4 direzioni verranno effettuate 4 analisi incrementali al passo separate, orientando i carichi orizzontali rispettivamente secondo le angolazioni 0°, 90°, 180°, 270° rispetto all’asse X orizzontale.
Eccentricità sismica addizionale
Selezionando la casella è possibile tener conto nell'analisi pushover di una eccentricità sismica addizionale, da impostare nel campo posto di fianco in cm. Impostando un valore di eccentricità non nullo, il programma analizza una particolare scansione sismica con le tre varianti:
- eccentricità negativa,
- eccentricità nulla,
- eccentricità positiva.
Calcolo fattori di partecipazione
E' possibile selezionare uno dei due metodi di calcolo per i fattori di partecipazione: quello tradizionale, basato sulla metrica dell'energia cinetica e quello più generale basato sull'energia di deformazione.
Il problema risponde all’esigenza di valutare in che misura il comportamento cinematico dell’edificio soggetto ad una scansione pushover sia dominato da uno dei modi principali dell’analisi dinamica, ovvero dei modi con maggiore periodo e a più alta partecipazione di massa. Il problema per certi versi è simile a quello che si incontra nell’analisi dinamica modale, quando per esigenze computazionali si rinuncia ad una ricostruzione completa della soluzione in spostamento e si accetta il cosiddetto “troncamento modale”, che permette di valutare e considerare un numero m di modi di vibrare anche di molto inferiore al numero totale n dei modi totali. Si è visto infatti che l’informazione sul comportamento dinamico della struttura tende spesso (ma non sempre) a concentrarsi sui modi a periodo proprio più alto, pertanto può risultare conveniente considerare solo i primi m modi (essendo m << n), a patto di valutare con qualche criterio l’errore introdotto da questo troncamento, per assicurare che resti nei limiti di accettabilità. Nel caso non lo fosse sarà necessario aumentare il numero di modi da considerare o attivare la procedura di completamento modale, se prevista dal software.
Nel caso dell’analisi pushover, è assegnata la forzante sismica, prodotta da una opportuna distribuzione (generalmente costante o lineare lungo l’altezza) di accelerazioni proporzionalmente crescenti e dirette secondo un l’angolo di incidenza α assegnato. L’analisi è rieseguita più volte facendo variare sia la forma della distribuzione che l’angolo di incidenza secondo una scansione assegnata. Nella singola analisi è noto il vettore delle forze sismiche nodali f[ag] := ag fα e lo spostamento u va adesso calcolato a partire da questo sistema di forze: u = K-1 fα
Per ogni vettore u della scansione pushover, possono essere calcolati i fattori di partecipazione associati ai modi di vibrazione principali, in maniera del tutto simile a quanto si fa nell’analisi dinamica modale per il calcolo delle partecipazioni di massa, e in entrambi i casi il procedimento presuppone che sia preliminarmente definita la metrica || || con cui si misura il vettore spostamento u, ovvero che sia opportunamente scelta una appropriata matrice metrica Q tale che
|| u || := uT Q u
Scelte convenienti possono essere:
Q := M essendo M la matrice delle masse,
Q := K essendo K la matrice di rigidezza.
Nei due casi si ottiene
||u||2c := uT M u norma in energia cinetica
||u||2d := uT K u norma in energia di deformazione
Entrambe queste norme hanno forte significato meccanico e, sfruttando la condizione di ortonormalità forniscono espressioni facilmente gestibili.
La norma in energia cinetica è quella tradizionalmente più usata, essendo questa la scelta più favorevole per ridurre l’impegno computazionale. Tuttavia è ormai riconosciuto che non rappresenta una misura appropriata per caratterizzare l’accuratezza della espansione modale troncata in quanto, proprio perché basata sulla energia cinetica e quindi essenzialmente sul quadrato della velocità, tende a sopravvalutare il peso dei modi ad alta frequenza, caratterizzati da forte velocità e bassa escursione.
Pertanto, al variare di numero m dei modi considerati, la percentuale di massa eccitata tende molto lentamente al valore unitario tanto che generalmente si ritiene che una percentuale di massa eccitata maggiore del 90% caratterizzi già una sufficiente accuratezza, malgrado che un errore del 10%, se effettivo, possa essere difficilmente accettato. L’errore residuo è poi a volte sopravvaluto in modo eccessivo, tanto da rendere realmente difficile il rispetto della verifica. In alcuni casi, in cui parti della struttura sono caratterizzate da spostamenti così piccoli da potersi considerare quasi impediti, la difficoltà può essere solo aggirata eliminando queste parti dal conteggio delle masse, come capita ad esempio in edifici con piani cantinati molto rigidi.
La norma in energia di deformazione, in quanto direttamente espressa in termini di quadrato di tensioni fornisce ovviamente una misura molto più appropriata ai fini della ricostruzione sia delle sollecitazioni che degli spostamenti che si producono nella struttura e permette di caratterizzare in maniera più affidabile l’errore prodotto dal troncamento modale. Sarebbe quindi senz’altro da preferire e l’uso della norma in energia cinetica si giustifica solo in ragione di un allineamento con la tradizione.
Per maggiori informazioni si rimanda a Fattori di partecipazione
Fattore riduttivo di duttilità per elementi travi e pilastri
Corrisponde al fattore riduttivo di duttilità γel che interviene nel calcolo della rotazione limite di collasso θu di una sezione di verifica.
La norma indica il valore 1.5 per tale parametro [Ntc18-C8.7.2.3.2, Istruzioni Ntc08-C8F, Opcm 3274-11.A ].
Fattore riduttivo di duttilità per elementi parete
Corrisponde ad un ulteriore fattore riduttivo che si applica in caso di pareti all’espressione della rotazione limite di collasso θu di una sezione. In Edisis, date le modalità con cui viene svolta l’analisi non si ha una distinzione netta tra pilastri normali e pilastri-parete. Ai fini dell’utilizzo del fattore si considera pilastro (e quindi il fattore non viene applicato) se il rapporto H/B < 2 e si considera parete se H/B > 5, applicando una interpolazione lineare nei casi intermedi.
La norma indica il valore 1.6 per tale parametro [Ntc18-C8.7.2.3.2, Istruzioni Ntc08-C8F, Opcm 3274-11.A ].
Riduzione della duttilità limite per lo stato limite di Salvaguardia vita
Lo stato limite di Salvaguardia vita (Danno Severo) corrisponde al raggiungimento di danni importanti e generalmente irreversibili. Ai fini dell’analisi tale stato limite è definito dal primo raggiungimento, in una qualsiasi sezione della struttura, di una aliquota prefissata della rotazione ultima.
La norma indica che la capacità di rotazione totale rispetto alla corda sia 3/4 della rotazione ultima θu [Ntc18-C8.7.2.3.3, Istruzioni Ntc08-C8.7.2.5, Opcm 3274-11.3.2.1], ovvero l'assunzione del il valore 0.75 per tale parametro .
Condizioni Slo/Sld
In questo quadro si possono selezionare le opzioni che stabiliscono le condizioni di raggiungimento degli stati limite di esercizio Slo e Sld:
- Rotazione presso-flessionale:
selezionando l'opzione si attiva la condizione di raggiungimento degli stati limite Slo e Sld al primo raggiungimento della rotazione di snervamento in qualche elemento
[Ntc18-C8.7.2.3.4, Istruzioni Ntc08-C8.7.2.5, Opcm 3274-11.3.2.1]. - Scorrimento piani:
l'opzione (sempre attiva) esprime la condizione di raggiungimento degli stati limite Slo e Sld al primo raggiungimento del corrispondente scorrimento limite di interpiano in qualche maglia di telaio (fra quelle marcate) [Ntc18-7.3.6, Ntc08-7.3.7.2, Opcm 3274-4.11.2]. La limitazione riguardante lo scorrimento dei piani corrisponde in effetti ad una misura precauzionale per la prevenzione dei danni alle tamponature ed agli impianti.
Condizioni Slv
In questo quadro si possono selezionare le opzioni che stabiliscono le condizioni di raggiungimento dello stato limite ultimo Slv:
- Rotazione presso-flessionale:
l'opzione (sempre attiva) esprime la condizione di raggiungimento dello stato limite Slv al primo raggiungimento dell'aliquota prefissata della rotazione di collasso (tipicamente il 75%) in qualche elemento [Ntc18-C8.7.2.3.3, Istruzioni Ntc08-C8.7.2.5, Opcm 3274-11.3.2.1]. - Resistenza a taglio:
selezionando l'opzione si attiva la condizione di raggiungimento dello stato limite Slv al primo raggiungimento della resistenza ultima a taglio in qualche elemento (travi, pilastri, pareti) [Ntc18-C8.7.2.3.5, Istruzioni Ntc08-C8.7.2.5, Opcm 3274-11.3.2.2]. - Resistenza nodo:
selezionando l'opzione si aggiunge la condizione di raggiungimento dello stato limite Slv al primo raggiungimento della resistenza ultima a trazione e compressione diagonale in qualche nodo, secondo le indicazioni di normativa [Ntc18-C8.7.2.3.5, Istruzioni Ntc08-C8.7.2.5, Opcm 3274-11.3.2.3].
Si fa presente inoltre, che le espressioni di verifica sono quelle indicate per i nodi trave-pilastro degli edifici di nuova costruzione, che contengono il contributo esplicito della staffatura (se presente) e sono estensibili anche ai contributi degli eventuali interventi di rinforzo [Ntc08 7.4.4.3, Ntc18 7.4.4.3, EN1998-1 p.5.4.3.3/5.5.3.3], sia in termini di armatura, sia in termini di confinamento indotto.
Precisiamo che la possibilità di attivazione/disattivazione di una condizione di stato limite è anche un mezzo per esplorare la sensibilità della struttura ad una interpretazione più o meno restrittiva delle disposizioni di normativa. Al riguardo, ricordiamo che la norma caratterizza lo SLV con il raggiungimento di una rotazione plastica alla corda pari al 75% della rotazione di collasso [Ntc18-C8.7.2.3.3]. In questo contesto, una eventuale crisi di taglio che dovesse precededere la condizione sulla rotazione ultima, potrebbe prefigurare comunque il raggiungimento anticipato dell'SLV, qualora si adotti una interpretazione più restrittiva, che tendiamo comunque a preferire. Con una interprezione meno restrittiva, l'utente potrebbe voler limitare l'effetto della crisi di taglio al solo danneggiamento (comunque rapido ed irreversibile), che porterebbe in ogni caso al raggiungmento dell'SLV nei successivi passi di carico per l'incremento conseguente della rotazione plastica.


Condizioni di raggiungimento degli stati limite Slo, Sld e Slv Attivazione dei meccanismi di crisi
Meccanismi di crisi negli elementi
In questo riquadro è possibile attivare o disattivare alcuni meccanismi di crisi. Si tenga presente che la possibilità di attivazione/disattivazione di un meccanismo risponde all'esigenza di consentire all'utente di analizzare l'effetto di un particolare meccanismo, ma in linea generale è opportuno ricordare che tutti sono essenziali per caratterizzare appiene il comportamento strutturale. Ad esempio, può essere utile sapere come incidono i collassi prematuri a taglio nei pilastri nella valutazione della sicurezza sismica: si può ottenere subito una risposta disattivando il meccanismo di collassa a taglio nei pilastri e rieseguendo l'analisi pushover. Questo tecnica vale anche per altri meccanismi, quali l'attivazione del degrado di resistenza a taglio in condizioni cicliche o la resistenza dei nodi. Per questa via è possibile ampliare ed arricchire il quadro informativo, prima di passare alle fasi operative di progetto dei rinforzi.
Quando un meccanismo di crisi è attivato, il programma controlla in ogni step dell'analisi pushover se negli elementi travi o pilastri (secondo selezione) è stata raggiunta una crisi con quel meccanismo: quando ciò accade l'elemento viene dichiarato danneggiato e viene assoggettato ad una legge di degrado coerente con il grado di duttilità del meccanismo, graduale per i meccanismi duttili, rapido e a carattere irreversibile per quelli fragili. In ogni caso la legge di danneggiamento porta al collasso dell'elemento e con questo alla perdita di ogni suo contributo di resistenza. Gli effetti sono macroscopicamente visibili anche sulla curva pushover, che per effetto dei danneggiamenti progressivi e dei successivi collassi subisce un progressivo calo nella portanza.
Collasso a pressoflessione pilastri e travi
Questo è il meccanismo che porta al riconoscimento dei collassi per pressoflessione o tensoflessione nelle travi e nei pilastri (incluse le pareti), Tale meccanismo si suppone sempre attivo: in ogni step dell'analisi pushover il programma controlla la rotazione plastica negli elementi e, in funzione dei valori raggiunti, provvede al riconoscimento dell'avvenuto raggiungimento degli stati limite e, col progredire della deformazione, al danneggiamento ed collasso dell'elemento.
Collasso a taglio pilastri e travi
E' il meccanismo che riguarda i collassi a taglio nelle travi e nei pilastri (incluse le pareti), Tale meccanismo può essere attivato/disattivato per permettere analisi esplorative per valutarne l'influenza e raccogliere informazioni per le successive fasi di rinforzo.
Quando il meccanismo è attivato, il programma controlla in ogni step dell'analisi pushover se negli elementi travi o pilastri (secondo selezione) è stata raggiunta una crisi a taglio: quando ciò accade l'elemento viene dichiarato danneggiato e viene assoggettato ad una legge di degrado irreversibile che porta rapidamente alla perdita di ogni suo contributo di resistenza.
Collasso nodi
E' il meccanismo che riguarda i collassi dei nodi per raggiunta resistenza a trazione o a compressione diagonale, Tale meccanismo può essere attivato/disattivato per permettere analisi esplorative per valutarne l'influenza e raccogliere informazioni per le successive fasi di rinforzo.
Quando il meccanismo è attivato, il programma controlla in ogni step dell'analisi pushover se nei nodi è stata raggiunta una crisi di resistenza a trazione o a compressione diagonale: quando ciò accade il pilastro sottostante al nodo viene dichiarato danneggiato e, come per il meccanismo fragile del taglio, viene assoggettato ad una legge di degrado irreversibile che porta rapidamente alla perdita di ogni suo contributo di resistenza.
Taglio ciclico
Con l'opzione si attiva il danneggiamento per taglio secondo quanto riportato al §C8.7.2.3.5 della C.M. n.7/2019/Ntc2018, che riporta una legge riduttiva del taglio resistente in funzione delle rotazioni plastiche presenti nell'elemento. Questo corrisponde al degrado che si osserva per la capacità tagliante in elementi soggetti a carico ciclico, ovvero ai cicli di isteresi che si manifestano nel corso di un evento sismico. Nel caso dell'analisi pushover, che è realizzata con un incremento di carico monotono, la resistenza tagliante subisce con tale meccanismo un progressivo degrado legato all'accumulo delle deformazioni plastiche.
Per maggiori informazioni si veda Taglio ciclico
Gli effetti delle preferenze sulle Condizioni Slv e sui Meccanismi di crisi
Le condizioni Slv sulla resistenza a taglio degli elementi e sulla resistenza dei nodi corrispondono a crisi di tipo fragile. In effetti, queste condizioni definiscono quale siano le condizioni che determinano il raggiungimento di un particolare stato limite e che in definitiva fissano la posizione del corrispondente punto di stato limite sulla curva di pushover. Il controllo dei meccanismi di crisi (per collasso a pressoflessione, per taglio o per resistenza dei nodi) è invece regolato da altre preferenze, quelle riportate del riquadro Meccanismi di crisi negli elementi.
Si sarà notato che alcune condizioni di stato limite ed alcuni meccanismi di crisi non possano essere disattivati. Questo assicura che l'algoritmo iterativo che sta alla base del dell'analisi statica non lineare abbia un criterio di terminazione meccanicamente coerente, ovvero che le condizioni che portano alla conclusione dell'analisi si raggiungano in maniera certa, evitando nel contempo di ricorrere a criteri privi di un chiaro significato meccanico, come ad esempio la terminazione dell'analisi al raggiungimento di uno spostamento massimo prefissato arbitrariamente.
Il fatto che un meccanismo di crisi sia attivato, ma non lo sia la corrispondente condizione di raggiungimento dello stato limite non cambia sostanzialmente la curva pushover, ma può portare a qualche scostamento di posizione dei punti rappresentativi degli stati limite sulla curva stessa, più o meno evidente a seconda dei casi. In particolare, possono aversi le varie casistiche riportate in tabella.
|
Meccanismo di crisi a taglio |
Condizione di raggiungimento SLV per crisi di taglio |
|
Attivato |
Attivata La condizione è efficace. Al termine di ogni step dell'analisi pushover il primo raggiungimento in qualche elemento di una crisi di taglio decreta automaticamente raggiunto lo stato limite SLV. In questa evenienza il punto SLV è determinato dal primo raggiungimento della soglia di resistenza a taglio, se questa precede la condizione sulla rotazione plastica a presso-flessione. Non attivata La condizione rimane inefficace. Al termine di ogni step dell'analisi pushover l'eventuale raggiungimento in qualche elemento di una crisi di taglio non decreta automaticamente il raggiungimento dello stato limite SLV. L'elemento però è marcato con una legge di danno irreversibile che porta rapidamente alla perdita di ogni suo contributo, ad un drastico calo di portanza nella curva e verosimilmente al raggiungimento dello s.l. SLV nei passi di carico successivi. |
|
Non attivato Nel corso dell'analisi pushover non sono eseguiti i controlli delle crisi a taglio per gli elementi travi o pilastri (secondo selezione). |
Attivata La condizione rimane inefficace. Infatti, in assenza di controlli, non si avrà mai il riconoscimento di una crisi a taglio e il raggiungimento SLV per crisi di taglio non ha modo di verificarsi. Non attivata La condizione rimane inefficace. |
|
Meccanismo di crisi dei nodi |
Condizione di raggiungimento SLV per crisi dei nodi |
|
Attivato |
Attivata La condizione è efficace. Al termine di ogni step dell'analisi pushover il primo raggiungimento in qualche nodo di una crisi di resistenza decreta automaticamente raggiunto lo stato limite SLV. In questa evenienza il punto SLV è determinato dal primo raggiungimento della soglia di resistenza in un nodo, se questa precede la condizione sulla rotazione plastica a presso-flessione. Non attivata La condizione rimane inefficace. Al termine di ogni step dell'analisi pushover l'eventuale raggiungimento in qualche nodo di una crisi di resistenza non decreta automaticamente il raggiungimento dello stato limite SLV. Il pilastro sottostante però è marcato con una legge di danno irreversibile che porta rapidamente alla perdita di ogni suo contributo, ad un drastico calo di portanza nella curva e verosimilmente al raggiungimento dello s.l. SLV nei passi di carico successivi. |
|
Non attivato Nel corso dell'analisi pushover non sono eseguiti i controlli delle crisi di resistenza dei nodi. |
Attivata La condizione rimane inefficace. Infatti, in assenza di controlli, non si avrà mai il riconoscimento di una crisi di resistenza in un nodo e il raggiungimento SLV per crisi di taglio non ha modo di verificarsi. Non attivata La condizione rimane inefficace. |